في العالم ، يزداد شعبية كل يوم بين عمال النظافة الروبوتية. بفضل هؤلاء المساعدين الصغار ، يصبح المنزل أكثر نظافة ، ويتم بذل جهد أقل في التنظيف. هناك الكثير من التعديلات المختلفة للروبوتات ، وكلها تختلف في الوظائف والحجم والمعلمات الأخرى.
على وجه التحديد ، ستنظر هذه المقالة في مثال لكيفية ذلك
افعلها بنفسك يمكنك صنع روبوت بسيط ، والذي سيؤدي في حد ذاته إلى تنظيف الغرفة عند الضرورة. يتم استخدام وحدة التحكم هنا باسم "الدماغ"
اردوينو.
مواد وأدوات لتصنيع الروبوت:- لوحة تتحكم في تشغيل المحركات (درع المحرك Arduino) ؛
- لوحة اردوينو.
- محركان مع تروس (المحركات عند 3 فولت وسرعة دوران حوالي 100 دورة في الدقيقة) ؛
- العجلات (يمكن تصنيعها من علب الألمنيوم ؛
- مبرد من مصدر طاقة الكمبيوتر (ممكن في 5V و 12V) ؛
- مصدر طاقة 5 فولت (بطارية) ؛
- أسلاك ولوحة لتركيب العناصر الراديوية ؛
- لجعل القضية ستحتاج إلى حاوية بلاستيكية ؛
- حاوية صغيرة أخرى لإنشاء سلة نفايات ؛
- غراء ساخن
- مغناطيسات
- كرتون.
الخطوة الأولى. جزء من برنامج الروبوت والرسم:
قلب الروبوت هو جهاز تحكم Arduino. لبرمجة ذلك سوف تحتاج إلى جهاز كمبيوتر وبرامج خاصة.
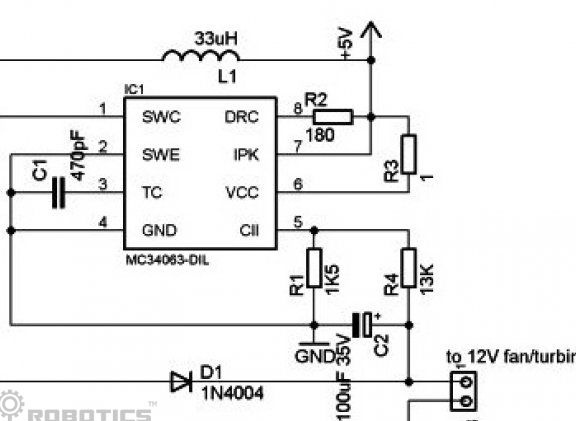
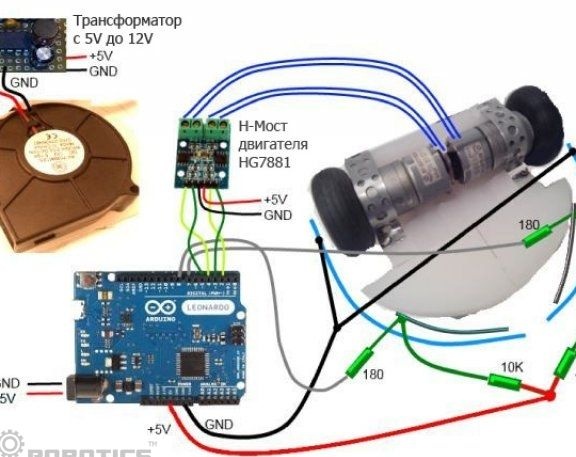
لتنزيل الرسم على اللوحة ، ستحتاج إلى برنامج Arduino IDE. أدناه يمكنك أخذ رمز برنامج الروبوت ورؤية الدائرة الرئيسية.
/*
برنامج للتحكم في الروبوت بمحركين.
يتحول الروبوت عندما تغير المحركات سرعتها واتجاهها.
مصدات أمامية على الجانبين الأيسر والأيمن تكتشف العقبات.
يمكن توصيل السونار بالموجات فوق الصوتية إلى المدخلات التناظرية (تم اختبارها على LV-MaxSonar-EZ1):
- وضع دبابيس في صفيف sonarPins بالترتيب التالي: اليسار ، اليمين ، الأمامي ، الآخرين ..
أمثلة:
1. السونار الأيمن والأيسر فقط المتصل بالدبابيس 2 و 3: sonarPins [] = {2،3}
2. السونار الأيسر والأيمن والأمام متصل بالدبابيس 2 و 3 و 5: sonarPins [] = {2،3،5}
3. السونار الأمامي الوحيد المتصل بالطرف 5: sonarPins [] = {-1، -1.5}
4. توصيل السونار الأيسر فقط بالدبوس 2: sonarPins [] = {2}
5. السونار الأيمن الوحيد المتصل بالدبابيس 3: sonarPins [] = {-1،3}
6.5 سونارات متصلة بالدبابيس 1،2،3،4،5: sonarPins [] = {1،2،3،4،5}
يستخدم درع المحرك لتشغيل المحركات.
*/
const int Baud = 9600 ؛ // سرعة منفذ UART
// خصائص السونار
int sonarPins [] = {1، 2}؛ // Analog Pin Nums to sonar sensor pin AN
ثوابت طويلة MinLeftDistance = 20 ؛ // الحد الأدنى المسموح به للمسافة اليسرى
ثبات MinRightDistance = 20 ؛ // الحد الأدنى المسموح به للمسافة الصحيحة
ثابت طويل MinFrontDistance = 15 ؛ // الحد الأدنى المسموح به للمسافة الأمامية
const int SamplesAmount = 15 ؛ // المزيد من العينات - قياس أكثر سلاسة وتأخرًا أكبر
const int SonarDisplayFrequency = 10 ؛ // عرض سطر واحد فقط من هذه الأسطر - ليس كلها
int sonarDisplayFrequencyCount = 0 ؛
عامل ثابت طويل = 2.54 / 2 ؛
عينات طويلة [sizeof (sonarPins)] [SamplesAmount] ؛
int sampleIndex [sizeof (sonarPins)] ؛
// الجانب الأيمن
const int pinRightMotorDirection = 4 ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "DIR A"
const int pinRightMotorSpeed = 3 ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "PWM A"
const int pinRightBumper = 2 ؛ // حيث يتم توصيل المصد الأيمن
// الجانب الأيسر
const int pinLeftMotorDirection = 7 ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "DIR B"
const int pinLeftMotorSpeed = 6 ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "PWM B"
const int pinLeftBumper = 8 ؛ // حيث يتم توصيل المصد الأيمن
// uncomment السطران التاليان إذا كان لدى Motor Shield فواصل
// const int pinRightMotorBreak = PUT_BREAK_PIN_HERE ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "BREAKE A"
// const int pinLeftMotorBreak = PUT_BREAK_PIN_HERE ؛ // يمكن وضع علامة على هذا على درع المحرك كـ "BREAKE B"
// الحقول
ثابت int turnRightTimeout = 100 ؛
const int turnLeftTimeout = 150 ؛
// تعيين في عداد الوقت الذي يتم فيه تشغيل المحرك مرة أخرى: N / 10 (بالمللي ثانية)
عدد العد التنازلي أثناء تحريك الحق ؛
int countDownWhileMovingToLeft ؛
// التهيئة
إعداد باطل () {
Serial.begin (Baud) ؛
initPins () ؛
// uncomment 4 أسطر تالية إذا كان لدى Motor Shield فواصل
// pinMode (pinLeftMotorBreak، OUTPUT) ؛
// pinMode (pinRightMotorBreak ، OUTPUT) ؛
// digitalWrite (pinLeftMotorBreak، LOW) ؛ // قم بإيقاف الفواصل
// digitalWrite (pinRightMotorBreak، LOW) ؛ // قم بإيقاف الفواصل
runRightMotorForward () ؛
runLeftMotorForward () ؛
startMotors () ؛
}
// الحلقة الرئيسية
حلقة فارغة () {
checkAndSetRightSide () ؛
checkAndSetLeftSide () ؛
processRightSide () ؛
processLeftSide () ؛
تأخير (10) ؛ // كرر كل 10 مللي ثانية
}
//---------------------------------------------------
initPins () {
pinMode (pinRightMotorDirection ، OUTPUT) ؛
pinMode (pinRightMotorSpeed ، OUTPUT) ؛
pinMode (pinRightBumper ، INPUT) ؛
pinMode (pinLeftMotorDirection ، OUTPUT) ؛
pinMode (pinLeftMotorSpeed ، OUTPUT) ؛
pinMode (pinLeftBumper ، INPUT) ؛
for (int i = 0؛ i pinMode (sonarPins [i] ، INPUT) ؛
}
startMotors () {
setMotorSpeed (pinRightMotorSpeed، 255) ؛
setMotorSpeed (pinLeftMotorSpeed، 255) ؛
}
باطل waitWhileAnyBumperIsPressed () {
بينما (checkBumperIsNotPressed (pinRightBumper)
&& checkBumperIsNotPressed (pinLeftBumper)) {
تأخير (20) ؛ // تحقق كل 20 مللي ثانية
}
}
باطلة processRightSide () {
إذا تحقق (countDownWhileMovingToRight MinFrontDistance) // إذا لم يتم الوصول إلى الحد الأدنى المسموح به للمسافة الأمامية
العودة
if (checkCounterIsNotSet (countDownWhileMovingToLeft)) // إذا كان العداد لا يقوم بالعد التنازلي بعد
runLeftMotorBackward () ؛ // تشغيل المحرك الأيمن للخلف
countDownWhileMovingToLeft = turnLeftTimeout؛ // اضبط العداد على القيمة القصوى لبدء العد التنازلي
}
bool checkCounterIsNotSet (عداد دولي) {
عداد العودة = SamplesAmount)
sampleIndex [pinIndex] = 0 ؛
عينات [pinIndex] [sampleIndex [pinIndex]] = القيمة ؛
العودة صحيحة ؛
}
calculateAvarageDistance الطويل (int pinIndex) {
متوسط طويل = 0 ؛
for (int i = 0؛ i متوسط + = عينات [pinIndex] [i] ؛
متوسط العائد / عدد العينات ؛
}
الخطوة الثانية تحضير العناصر الأساسية للروبوت
يستخدم الورق المقوى كقاعدة لتثبيت جميع مكونات الروبوت ، بما في ذلك البطارية ولوحات التحكم والمحركات.
يجب لصق التوربين بشكل صحيح أو تثبيته بطريقة أخرى على حاوية بلاستيكية صغيرة ، حيث يجب عمل ثقب لامتصاص الأوساخ. في وقت لاحق ، يتم لصق هذا التصميم على قاعدة الكرتون. بالإضافة إلى ذلك ، يجب أن تحتوي الحاوية على ثقب إضافي يخرج من خلاله الهواء. قرر المؤلف أن يكون هناك مرشح ، لاستخدام النسيج الاصطناعية لهذه الأغراض.
في المرحلة التالية ، يجب لصق المبرد مع الماكينات ، ثم يتم تثبيت هذا التصميم على قاعدة من الورق المقوى.
الخطوة الثالثة نصنع عجلات للروبوت
لصنع العجلات ، تحتاج إلى أخذ علب الألمنيوم وقطع الأجزاء العلوية والسفلية منها. ثم يتم لصق هذه العناصر معًا. الآن يبقى فقط لإرفاق العجلات بشكل صحيح بمحركات المؤازرة بمادة لاصقة تذوب الساخنة. من المهم أن نفهم أنه يجب تثبيت العجلات بوضوح في وسط مهاوي المؤازرة. خلاف ذلك الروبوت سيقود معوجًا ، وسيستهلك طاقة.
الخطوة الرابعة عملية تجميع الروبوت النهائية
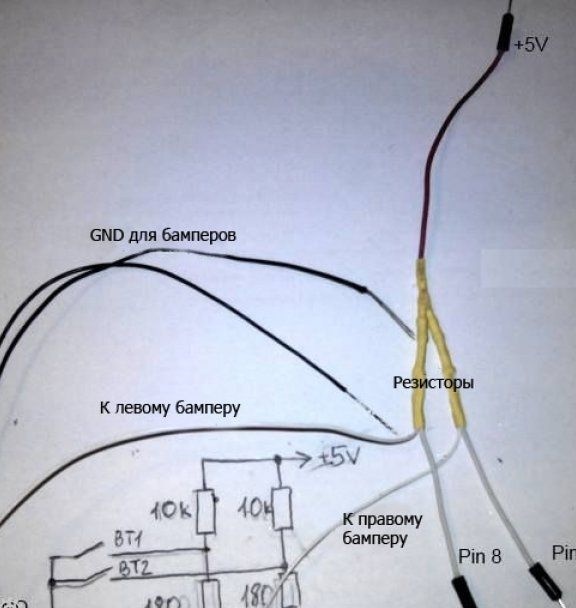
بعد تثبيت البطارية وتوصيل جميع عناصر الروبوت ، يبقى وضع الهيكل في حالة متينة. حاوية بلاستيكية كبيرة رائعة لهذه الأغراض. بادئ ذي بدء ، يجب عمل ثقوب في أنف جسم الروبوت ، والتي من خلالها سيتم إخراج جهات الاتصال التي ستعطي إشارة الإلكترونيات عندما يتصادم الروبوت مع عقبة.
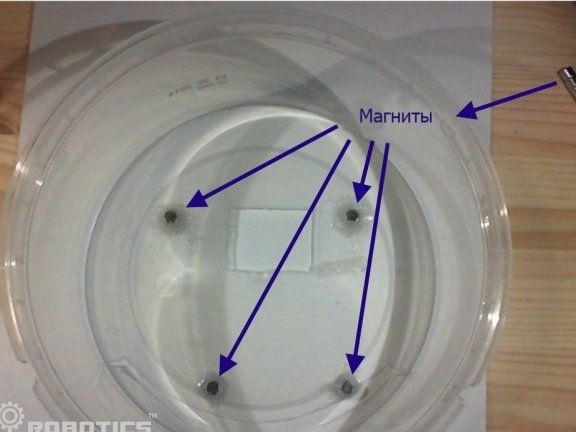
من أجل إزالة الحالة بسرعة وسهولة ، يتم استخدام المغناطيس لإصلاحها ، في هذه الحالة يوجد ثمانية منها. يتم لصق المغناطيس إلى داخل المكنسة الكهربائية وإلى الحاوية نفسها ، 4 قطع لكل منها.
هذا كل شيء. الآن يتم تجميع الروبوت ، ويمكن تجربته عمليًا. على الرغم من حقيقة أن الروبوت غير قادر على إعادة الشحن من تلقاء نفسه ولديه قدرة محدودة إلى حد ما فيما يتعلق بالملاحة ، إلا أنه في غضون نصف ساعة سيكون قادرًا على تنظيف القمامة في المطبخ أو الغرفة الصغيرة. مزايا الروبوت هي أنه يمكن العثور على جميع المكونات بسهولة وليست مكلفة للغاية. لا شك محلية الصنع يمكنك التحسين بإضافة أجهزة استشعار جديدة وعناصر أخرى.